iSWAP Module#
The R0 module allows fine grained control of the iSWAP gripper.
Common tasks#
Parking
You can park the iSWAP using park_iswap().
await lh.backend.park_iswap()
Opening gripper:
You can open the iSWAP gripper using iswap_open_gripper(). Warning: this will release any object that is gripped. Used for error recovery.
await lh.backend.iswap_open_gripper()
Rotations#
You can rotate the iSWAP to 12 predifined positions using iswap_rotate().
the positions and their corresponding integer specifications are shown visually here.
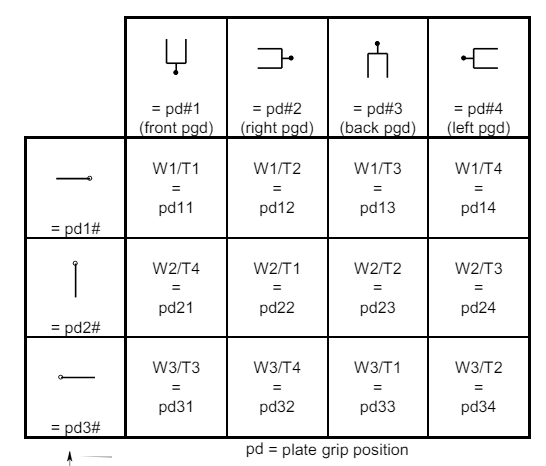
For example to extend the iSWAP fully to the left, the position parameter to iswap_rotate would be 12
You can control the wrist (T-drive) and rotation drive (W-drive) individually using rotate_iswap_wrist() and rotate_iswap_rotation_drive() respectively. Make sure you have enough space (you can use move_iswap_y_relative())
rotation_drive = random.choice([STAR.RotationDriveOrientation.LEFT, STAR.RotationDriveOrientation.RIGHT, STAR.RotationDriveOrientation.FRONT])
wrist_drive = random.choice([STAR.WristOrientation.LEFT, STAR.WristOrientation.RIGHT, STAR.WristOrientation.STRAIGHT, STAR.WristOrientation.REVERSE])
await lh.backend.rotate_iswap_rotation_drive(rotation_drive)
await lh.backend.rotate_iswap_wrist(wrist_drive)
Slow movement#
You can make the iswap move more slowly during sensitive operations using slow_iswap(). This is useful when you want to avoid splashing or other disturbances.
async with lh.backend.slow_iswap():
await lh.move_plate(plate, plt_car[1])